Prosthetic Gripper
Biomechatronics Project at the university of auckland
This project has been worked on by Reuben O’Brien, Dylan Townsend and Peter Mitchell. Reuben’s final report can be found at the end of the page. The gripper received full marks along with the award for the lightest design.

Motivation
Having the ability to grasp objects allows humans and robots to interact and manipulate their environment in technical and meaningful ways. These include controlling a phone, operating a motor vehicle and tasks as simple as eating and drinking. In terms of prosthetic or robotic grippers currently available the majority are fully actuated, heavy and expensive. These do offer the potential to interact with objects similar to a human hand however, they cost between $4,000 to $75,000 depending on how accurately it replicates a human hand. This cost is too significant for the majority of amputees that are missing an upper limb. Approximately 540,000 people are dealing with this in the USA and this number is expected to double by 2050. Therefore, there is a significant need for a low cost, lightweight prosthetic gripper which can be achieved through under actuation. This will mean amputees that can’t afford grippers in the thousands will still be able to manipulate everyday objects similar to that of a normal human hand.
Overview
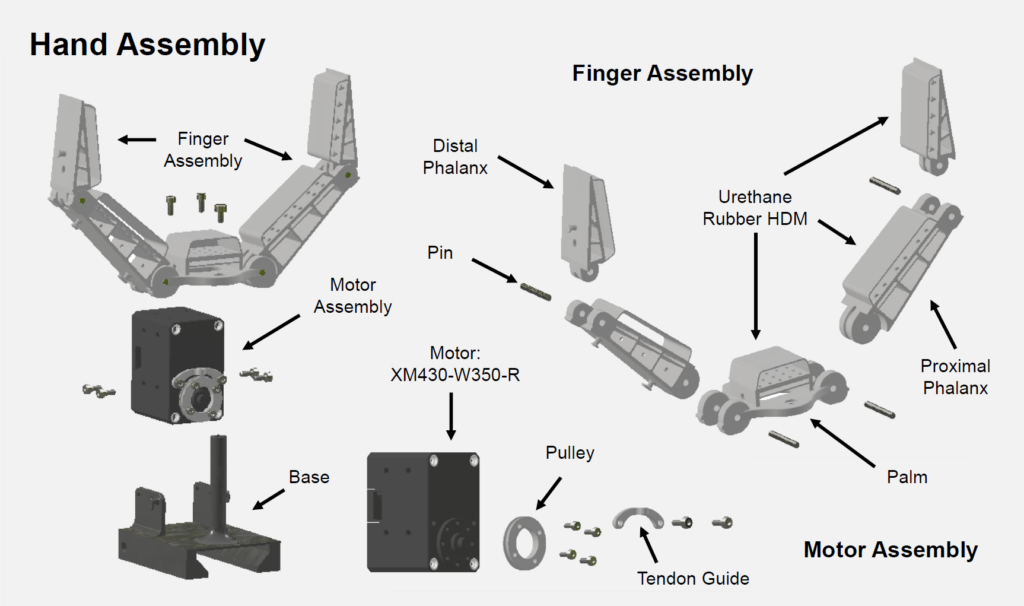
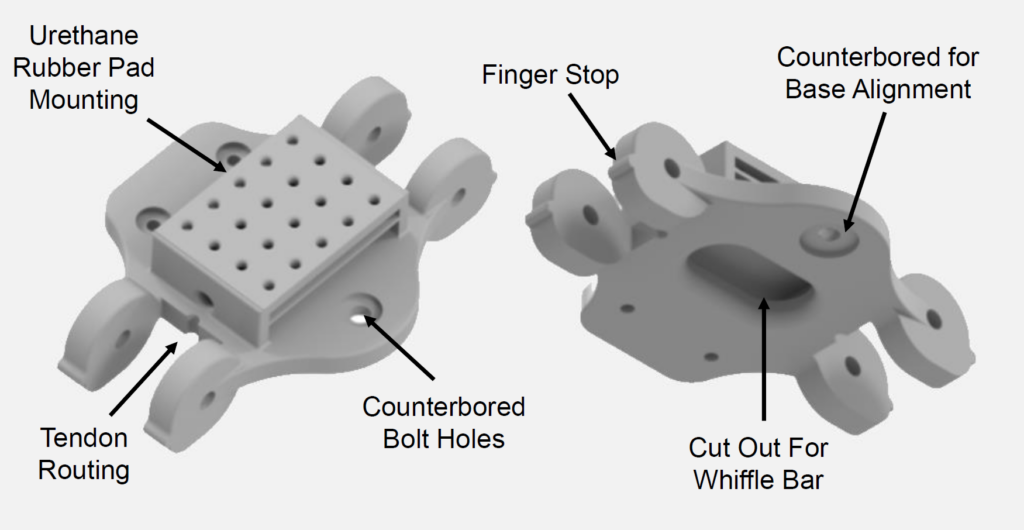
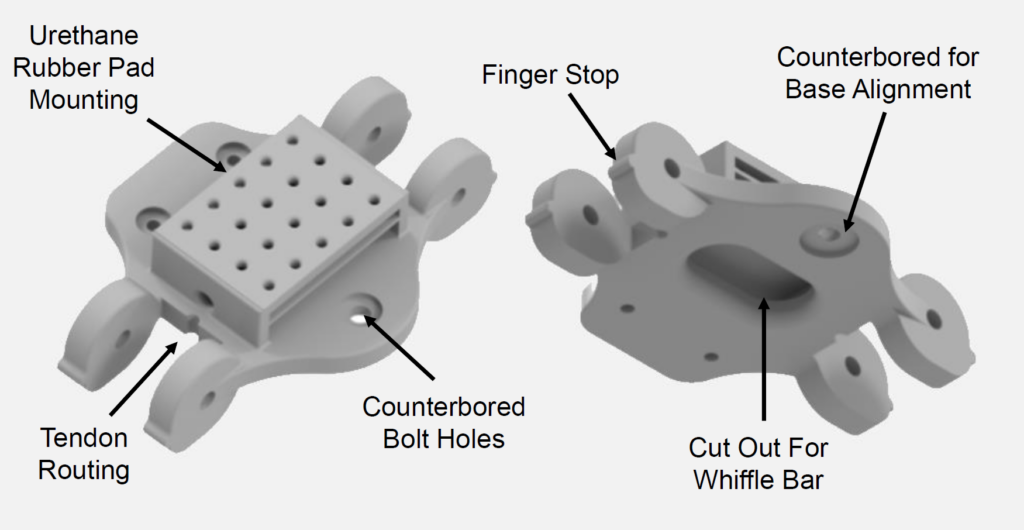
Gripper Base and Palm
- Counter-bored holes for the mounting to the base
- Cutouts on the underside to reduce weight and increase travel distance for a differential if needed
- Mounting surface with holes for the urethane rubber pad to interface with
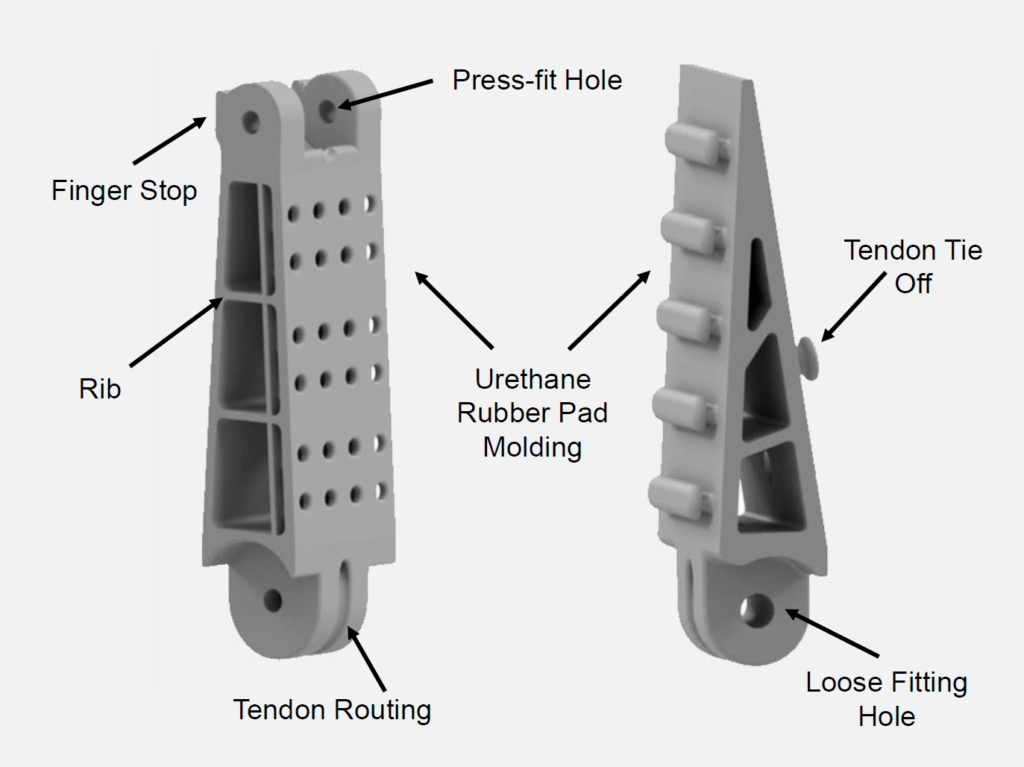
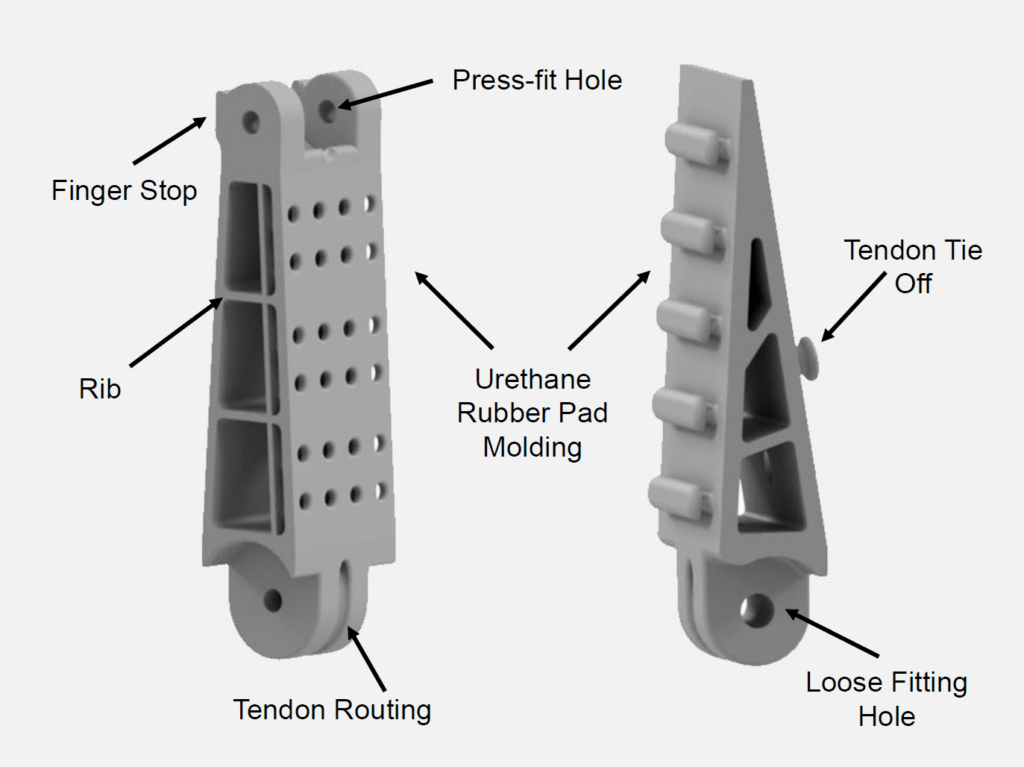
Gripper Fingers
- The finger design originates from the Finn-Ray gripper
- To increase the versatility an extra joint was added to allow it to deform more in the middle and allow the fingers to deform around the back of objects.
- Due to the limited material options, PLA was used which offers very little compliance in the fingers even with the extremely thin sections
- Pad mounting used is the same design as the palm on the proximal but different for the distal. The distal had to have different mounting features due to the limited thickness of it at the fingertip
- The hole sizes vary on the joints to allow a pin to fit tight on the proximal to hold it in place while loose for the distal to allow for free rotation
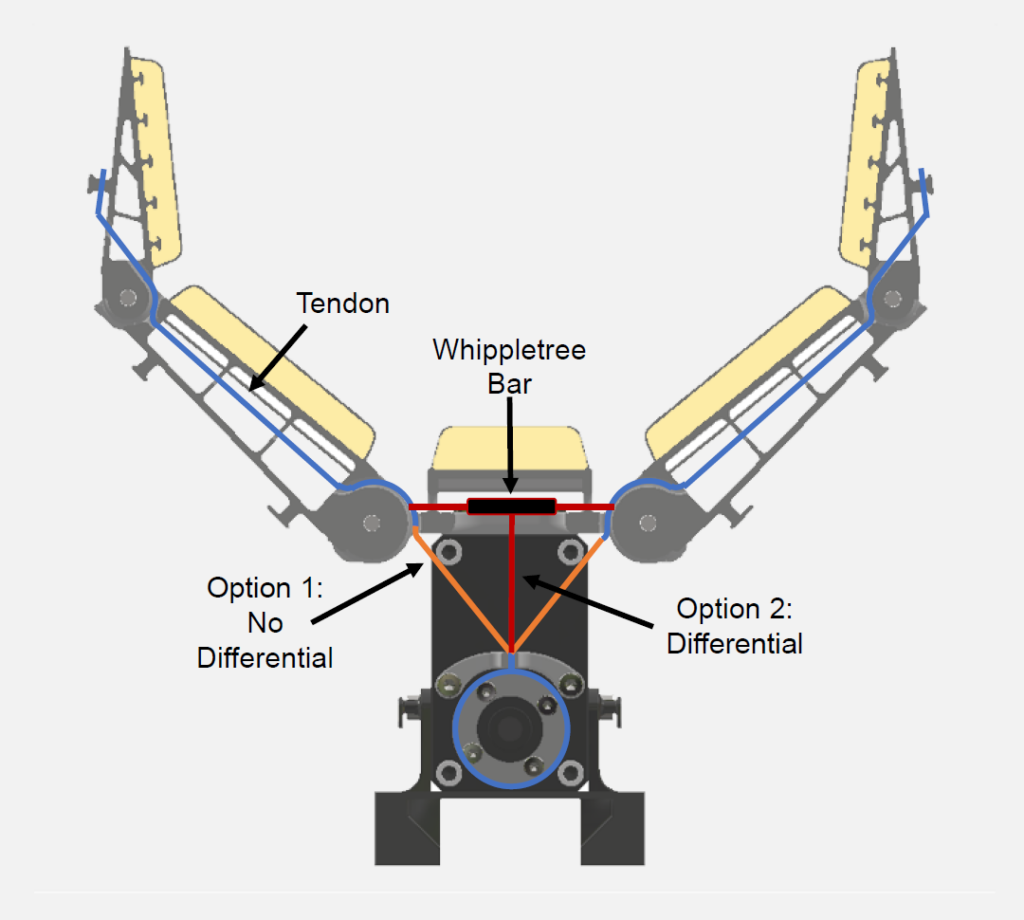
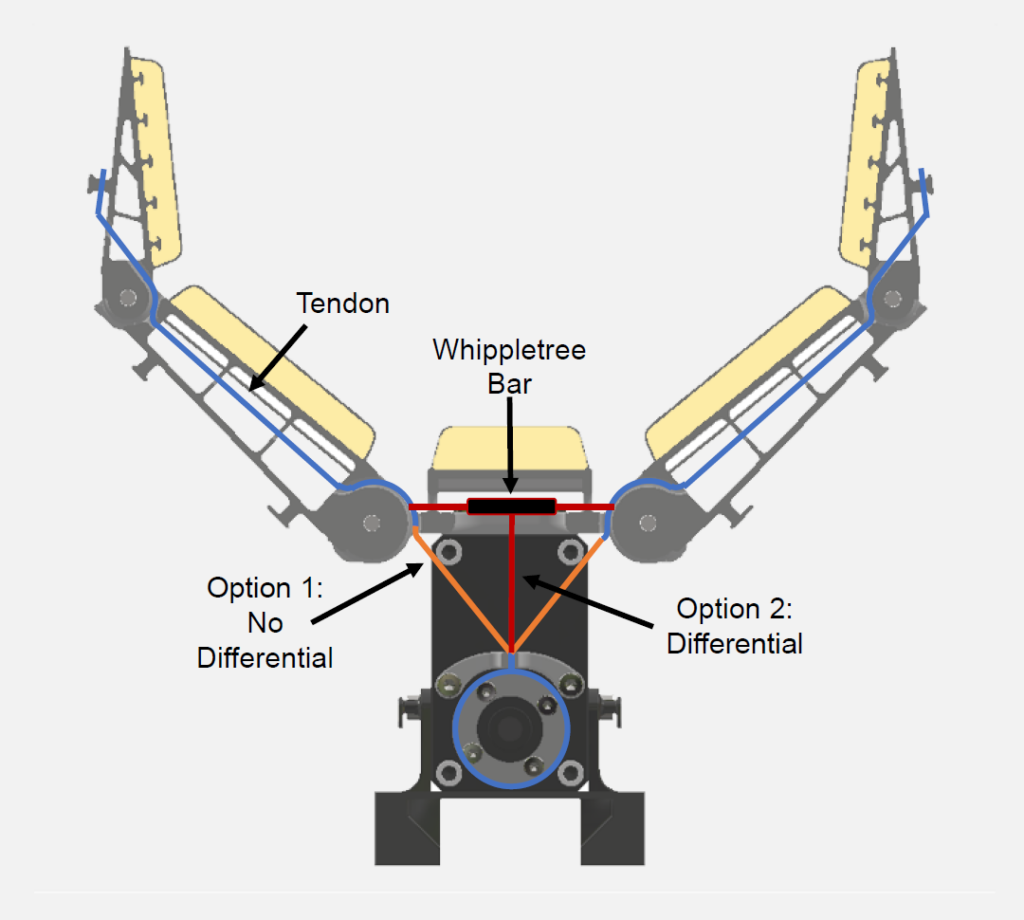
Tendon Routing
To control the fingers using only one motor multiple
tendon routing options were explored:
- Option 1 is using no differential which means both fingers are routed directly to the pulley that is attached to the horn of the motor Fig. 3. This means they both close at the same time and if one is jammed the other is unable to move.
- Option 2 uses a differential that is just a whippletree bar which means that the fingers can move individually or at the same time depending on the force applied to each finger. The tendon guide is used to ensure the whippletree bar is pulled directly down and not on an angle that would favour one finger over the other.
For the intended testing, the robotic arm that is connected to the gripper will be positioned in a way that the object is central between the fingers which means no differential is needed so option 1 is selected. To ensure the fingers close as intended when the tendon is tightened, rubber bands are used at the joints which results in the proximal closing in first and then the distal.
Results
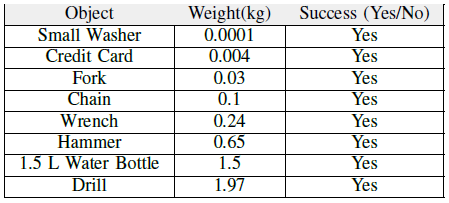
To evaluate the final design it was tested in a grasping
challenge. This tested its ability to pick up a range of objects while maintaining control, the robotic arm that is controlling the hand is then moved around to ensure the object is firmly grasped. The hand is also evaluated by its overall weight and maximum grip strength using a dynamometer.
The table shows all the objects tested, their weight and if
the gripper was able to pick up the object in a firm grasp.
As the results show than hand was capable of grasping all
the objects. The overall weight of the hand was 170g and
the maximum grip strength was 33N.