Low-Cost, Waterjet-Powered Robotic Speedboats
Final Year Engineering project at the University of Auckland
This project was completed by final year mechatronics students Reuben O’Brien, Peter Mitchel and supervised by Minas Liarokapis. Reuben’s final report (A+) can be found at the bottom of the page. Further information can be found at: Hackaday.io
This work is licensed under a Creative Commons Attribution 4.0 International License.
Overview
Motivation
With the majority of the world consisting of waterways and open ocean, it is important that they are well researched, monitored, and protected. Several companies have focused on the development of unmanned marine vehicles that rely on classic or renewable energy sources (e.g., wind-powered) and that can monitor the oceans autonomously. This has allowed, among others, tracking of sea life and assessing the impacts of climate change. In New Zealand and the Pacific Ocean in general, autonomous boats are becoming a key part of maritime units that monitor unmarked vessels and ensure marine laws are upheld. These boats can operate 24/7 and can be placed in dangerous situations without endangering human lives. Rivers throughout New Zealand have also been degrading in water quality due to farmland runoff and rubbish dumping. The NZ Police and Department of Conservation have attempted to enforce regulations but there are too many waterways for them to look over and monitor. Therefore, having autonomous boats that can independently monitor these rivers is of paramount importance.
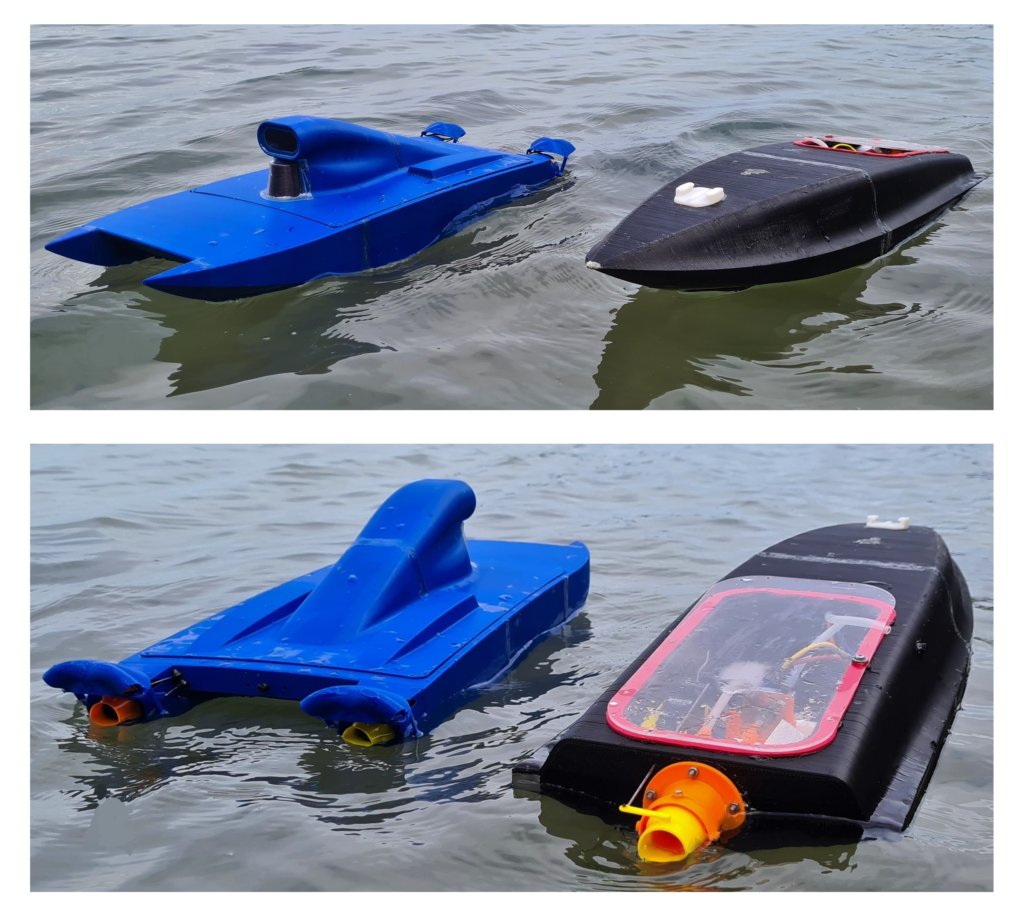
Monohull
It was the easiest to design and implement as it was only one hull and therefore only required one jet propulsion system. The boat was capable of rolling when turning making it very manoeuvrable. However, due to its roll, it produces an unsteady surface for the camera and LiDAR which results in unusable footage and LiDAR data. Therefore it was used to validate that a 3D printed hull would be durable, buoyant and waterproof enough. It also allowed for testing of propulsion systems on open water in dynamic testing rather than just stationery.
Catamaran
When considering the form of the hull there are two main criteria to consider; speed and stability. Two major components of the efficiency of a boat hull are the wetted surface area and the wave-making abilities of the hull. Minimising both of these resistance components allows for more efficient operation of the boat platform, including higher top speed and better acceleration.
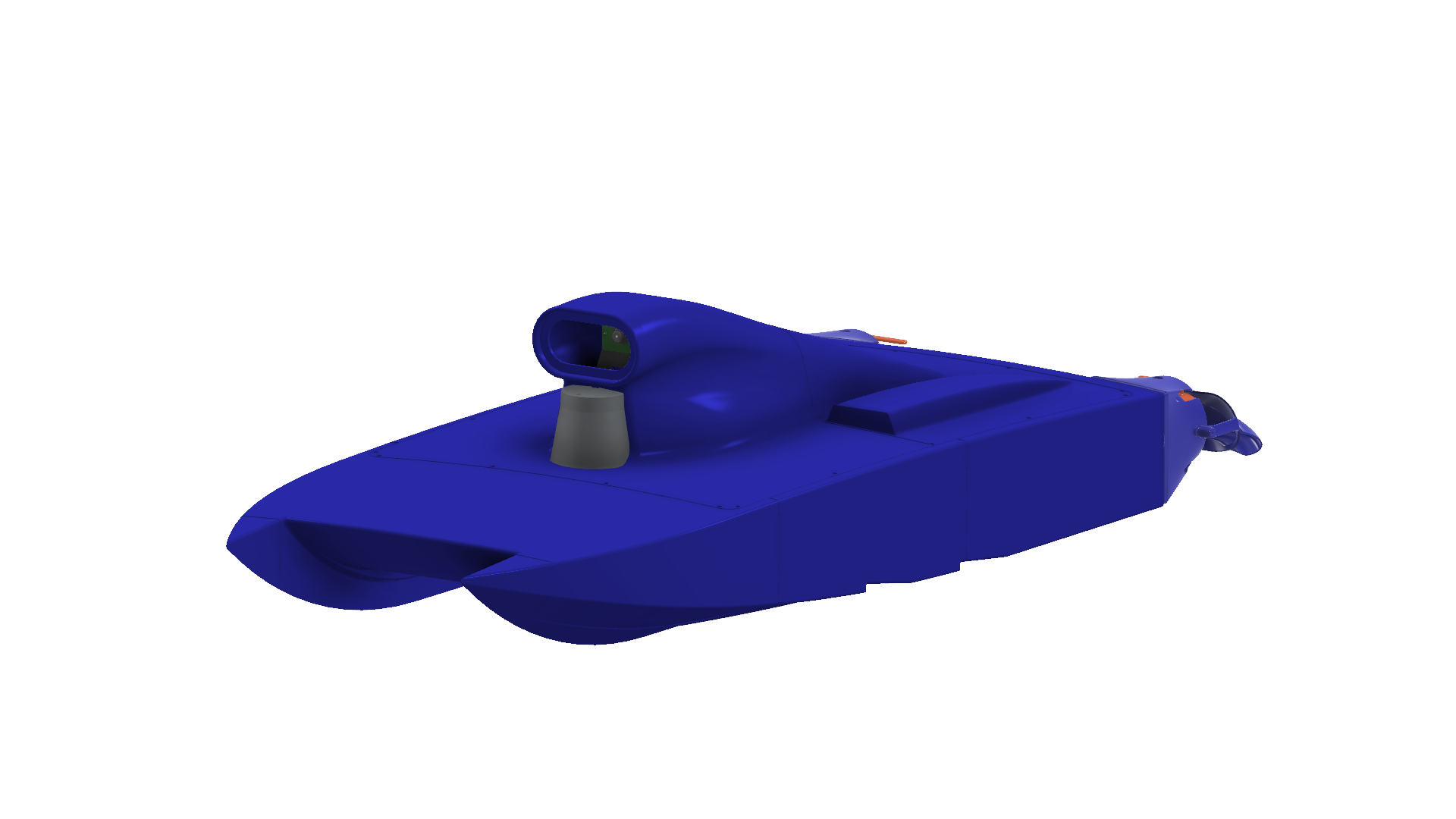
- Planning Catamaran Hull to reduce roll and wetted surface area
- Dimensions: 690 x 250 x 150mm
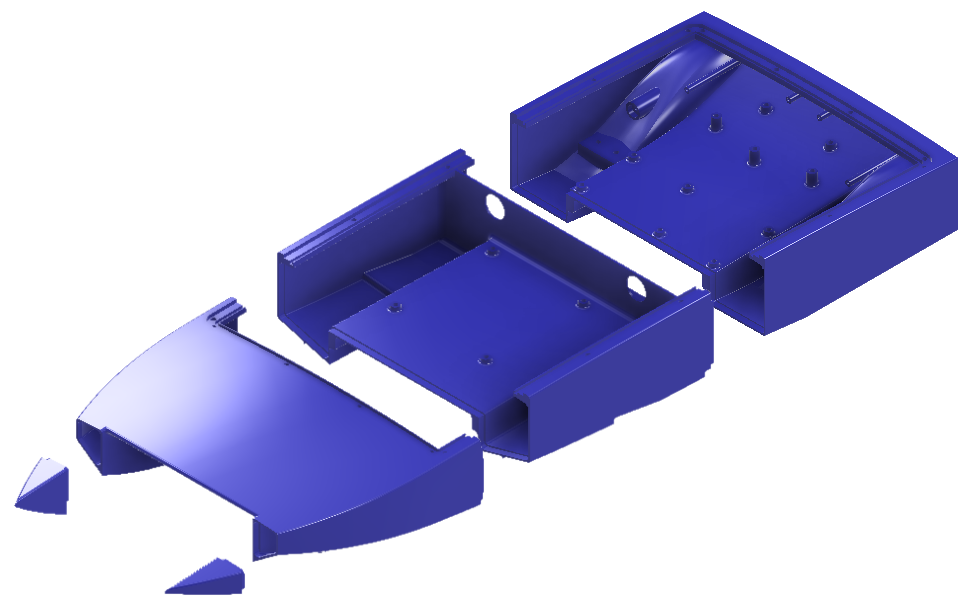
- Printed on a Prusa Mk3, build volume: 250 x 210 x 210 mm
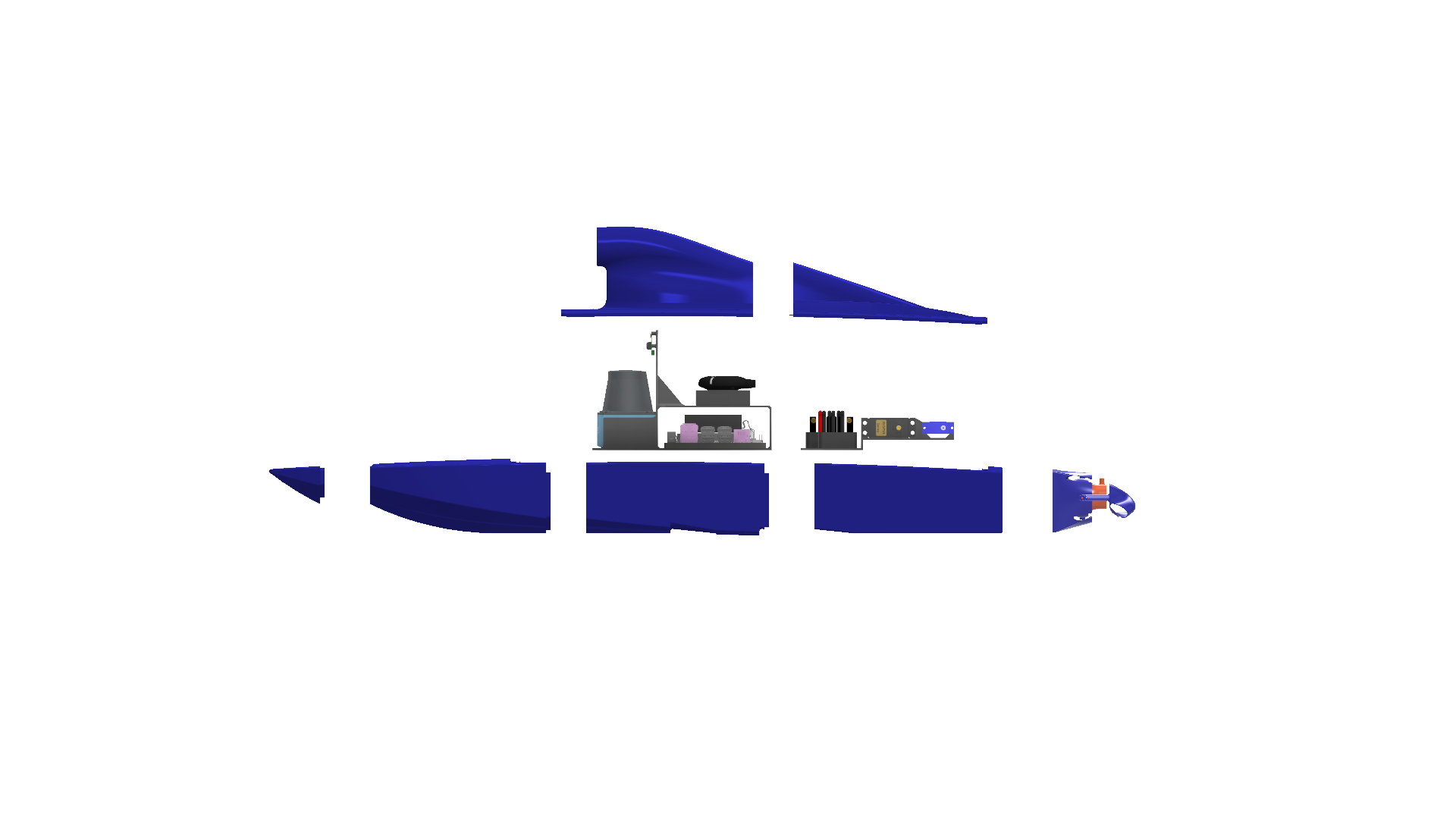
- Hull: 4 parts, Cover: 2 parts
- Centre of mass was kept below centre of buoyancy
- Weight distribution was symmetrical in X and Y orientation
- Spray rails added to increase lift
- The tunnel reduces in size to create a suspension of air to dampen the hull when it goes over waves
- Stepped hull to reduce wetted surface area when planning
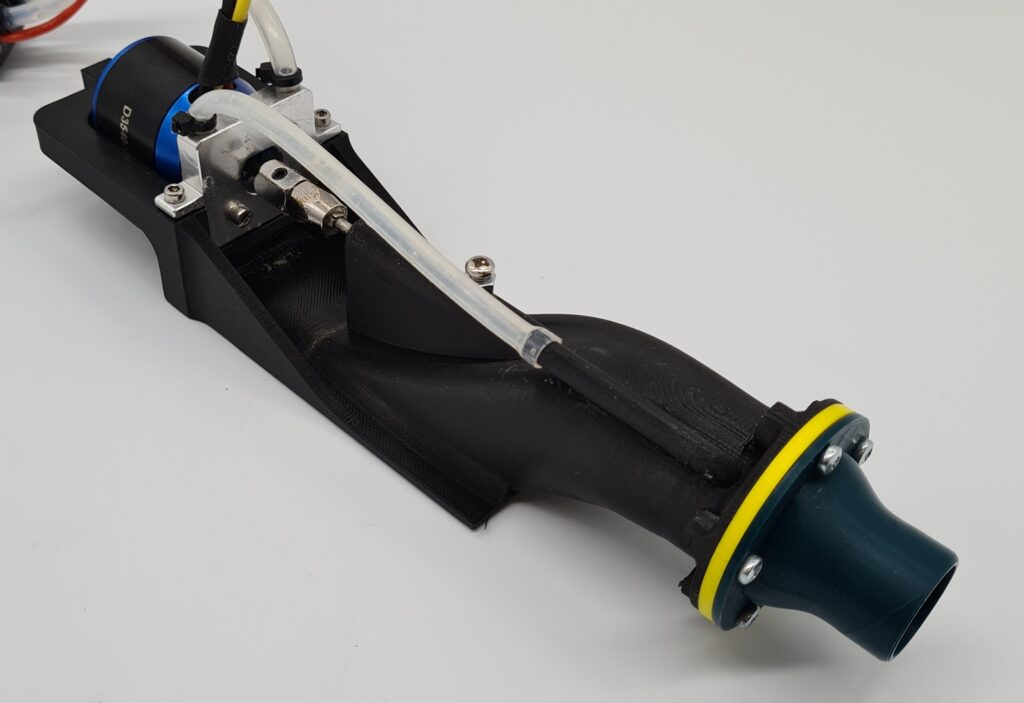
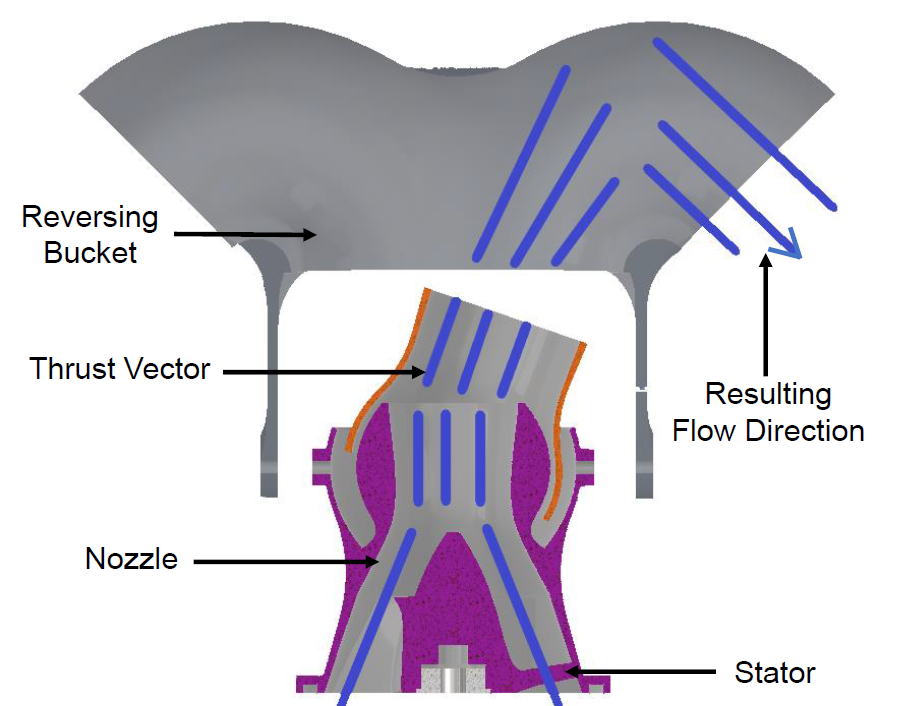
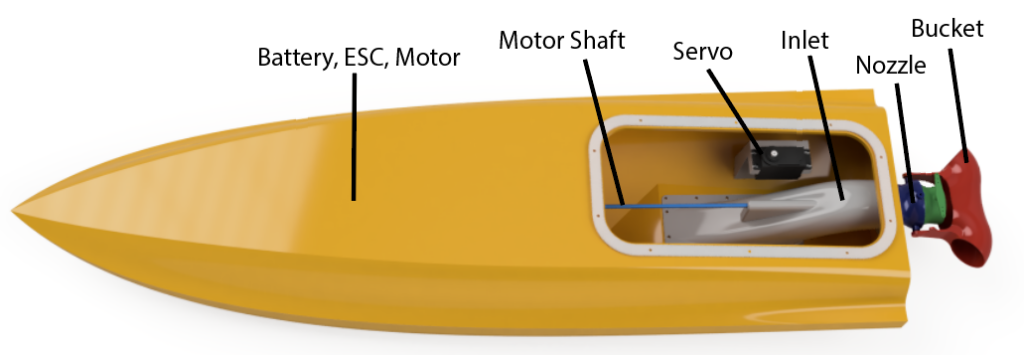
Jet Design
Propellers are the most commonly used propulsion systems on unmanned surface vehicles. This is due to the simplicity of their design and implementation, however, they offer no protection to their surroundings. Therefore it was decided that waterjets would be the ideal solution as they are inherently safe, allow for operation in shallow waters, reduce the risk of entanglement with ocean algae, and provide a range of design optimisation options.
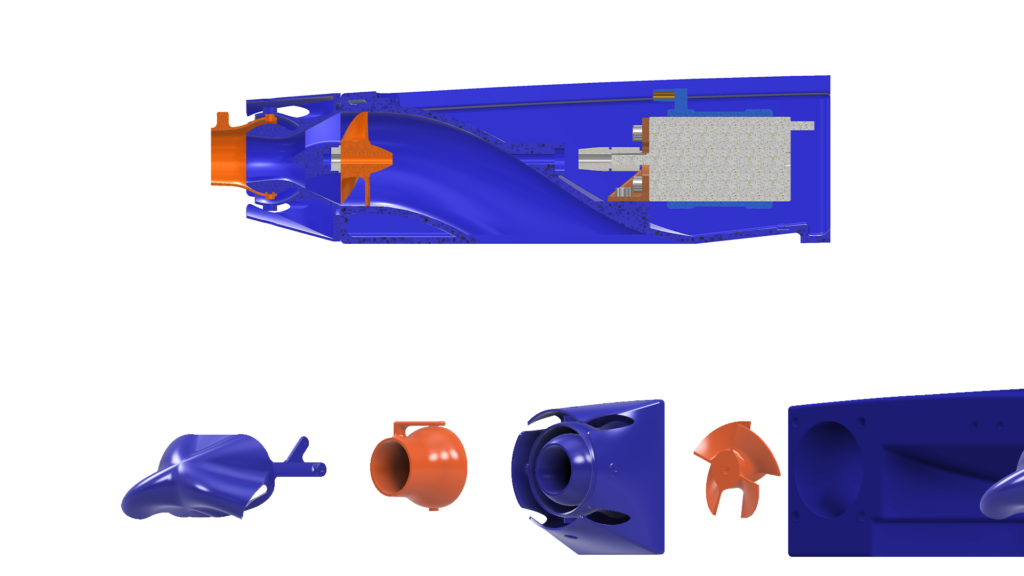
- Axial Flow Pump 40mm
- Thrust Vectoring Nozzle
- Reversing Bucket
- Stainless steel bearings and shaft
- 3D printed impeller, stator, nozzle and bucket
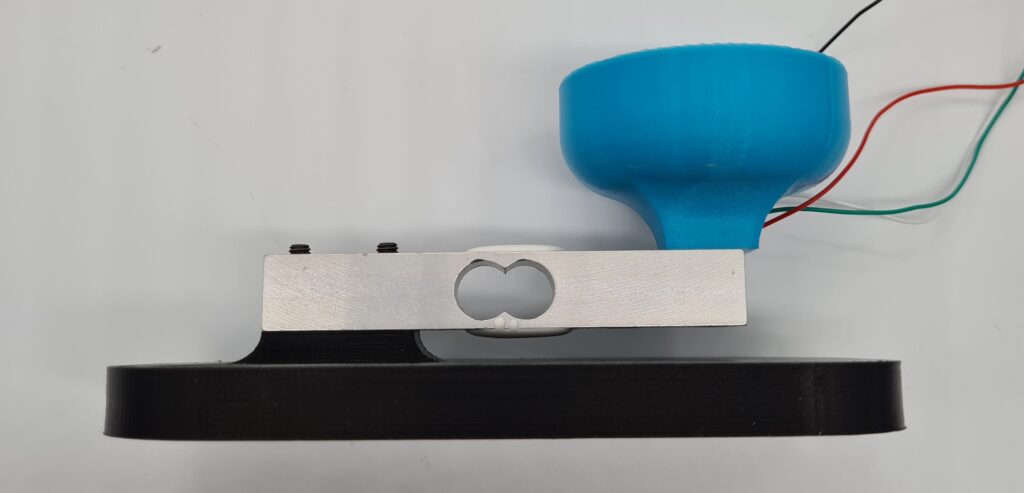
Jet Testing
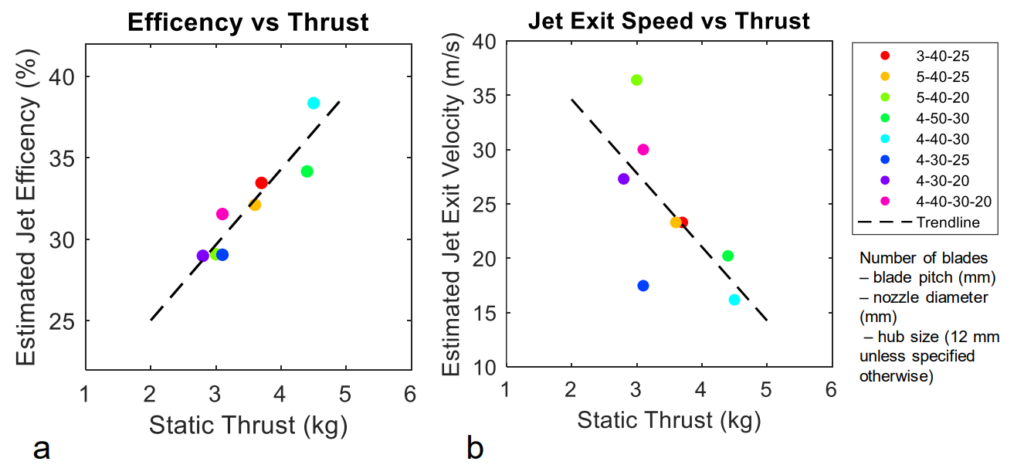
A single waterjet setup identical to that on the boat was run with varying impeller designs and nozzle sizes at a fixed throttle input. In terms of boat performance, the trade-off results in a balance between acceleration (thrust) and top speed (jet exit velocity)
- Measurements were taken from static testing therefore when the boat is moving the values will vary due to inlet velocity ratios.
- Thrust measured with a load cell
- Efficiency calculated from voltage and current draw
- The best was a 4 blade, 40 mm pitch impeller with a 30 mm nozzle exit produced 4.5 kg of thrust at an efficiency of 38%
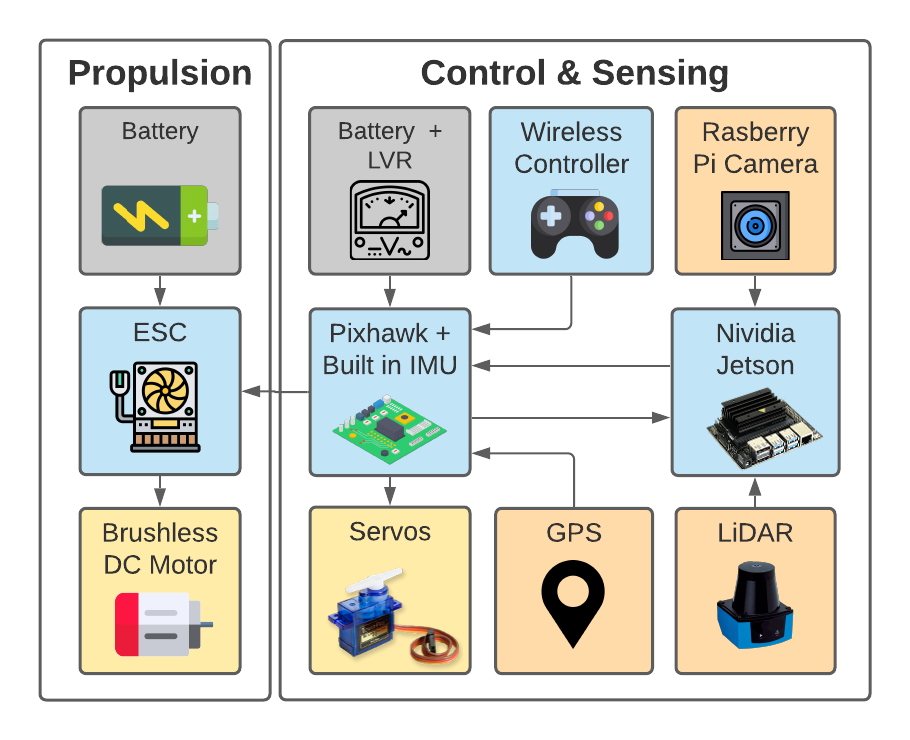
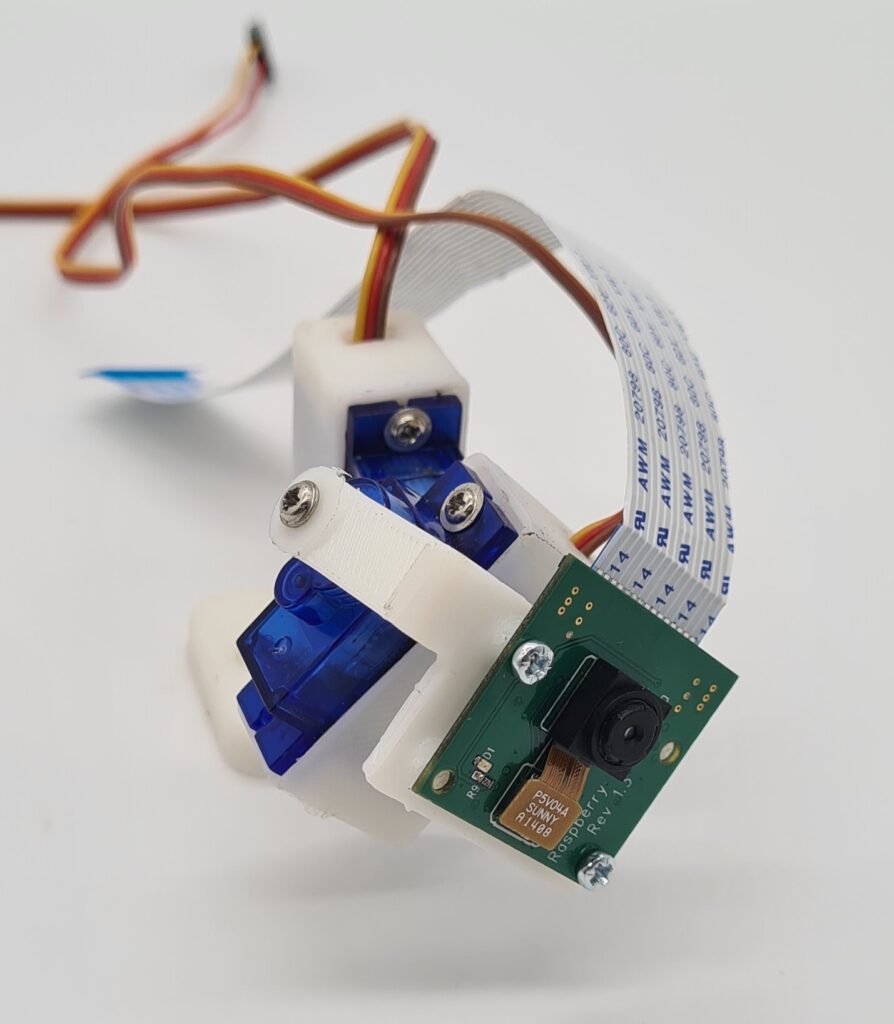
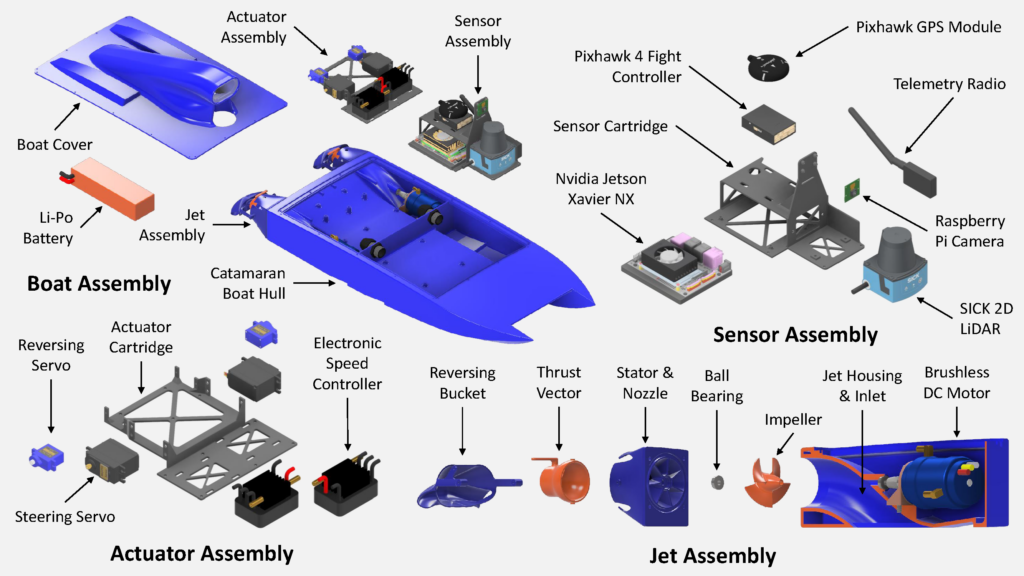
Hardware
To enable autonomous control of the platform we equip the platform with various sensors. In particular, the platform uses a 2D LiDAR (SICK TM510 LiDAR) and a monocular camera (Raspberry Pi Camera). These two sensors allow for detection of objects and landmarks in the environment. The two are used in conjunction with one another to increase the robustness of the computer vision system as neither LiDAR or RGB imaging offer great performance in dynamic environments with reflections like water. There are also two on-board IMUs, a GPS, and a magnetometer (provided by a Pixhawk 4 and Pixhawk 4 GPS Module) that provide the estimated pose of the platform. These sensors can also be used for active stabilization to further increase stability and reduce the chance of capsizing.
gallery